Comunicación presentada al V Congreso Smart Grids.
Autores
- Félix García-Torres, Responsable Laboratorio de Microrredes, Centro Nacional del Hidrógeno
- Jose Eufemio Gallego, Ingeniero Industrial, Centro Nacional del Hidrógeno
- Carlos Bordons Alba, Catedrático Dpto. de Ingeniería de Sistemas y Automática, Universidad de Sevilla
- Miguel Angel Ridao, Profesor Titular Dpto. de Ingeniería de Sistemas y Automática, Universidad de Sevilla
Resumen
La presente comunicación se basa en el desarrollo de un algoritmo de gestión avanzada desarrollo mediante el uso de técnicas de control predictivo basado en el modelo (Model Predictive Control, MPC). El algoritmo permite que la microrred interactue con agentes externos como operadores de sistema o vehiculos eléctricos, pudiendo actuar como agente intermedio entre estos dos últimos. Dependiendo del perfil de demanda y de una oferta de beneficio económico dado por el agente externo, el controlador de la microrred rediseña su planificación bajo el criterio de ofrecer el perfil más próximo a los requerimientos de potencia del agente externo según el beneficio que le haya sido ofrecido.
Palabras clave
Microrredes, Sistemas Híbridos de Almacenamiento de Energía, Model Predictive Control, Agentes Externos
Introducción
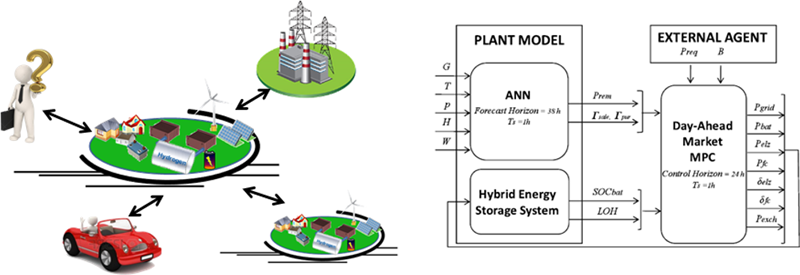
Las microrredes utilizan sus sistemas de almacenamiento de energía como sistema de flexibilidad interno para integrar el comportamiento estocástico de las fuentes de generación renovable y la demanda de energía de los consumidores. La flexiblidad de las microrredes puede ser utilizada por agentes externos tales como agregadores de energía, operadores de sistema y pueden funcionar como “entes” intermediarios entre la red eléctrica y los vehículos eléctricos.
En el presente trabajo se muestran los resultados desarrollados en el marco del proyecto CONFIGURA – Control Predictivo de Microrredes Reconfigurables con Almacenamiento Híbrido y Móvil, que tiene como objeto desarrollar estrategias de control MPC (Control predictivo basado en el modelo, Model Predictive Control) para dotar a la microrred de la funcionalidad de disponer de flexibilidad ante una demanda con un perfil determinado de potencia.
Para el desarrollo de la formulación presentada en el presente trabajo se parte de los desarrollos realizados previamente en las referencias [1]-[3]. El presente trabajo muestra tres casos de estudio: i) Gestión de la microrred con agentes externos, ii) Gestión de la microrred usando “Load Shifting” y iii) Gestión de la microrred usando “Load Curtailment”.
Algoritmo de control
El algoritmo tiene dos pasos: 1) Optimización de la microrred como sistema único que tan sólo interacciona con la red principal (salvo que se encuentre en modo aislado) y 2) Una vez que la optimización se ha llevado a cabo sin considerar el intercambio de energía con el agente externo se modifica la planificación de la microrred considerando el perfil de potencia requerido pero restringido al beneficio ofertado por el agente externo.
Formulación de la microrred como sistema único
La formulación original del controlador fue introducida en [1], bajo una estructura de control jerárquico con 4 etapas. El problema de control local de una de las microrredes de la figura 1, particularizado para el mercado diario de la energía, en un horizonte de control HC=24 horas y un tiempo de muestreo T_s=1h, siendo H_I, la hora i, usando la nomenclatura{grid:red,uc:supercondensador,bat:batería,fc:pila de combustible,elz:electrolizador} puede ser formulado como:

donde la formulación para J_grid (H_I ),J_uc (H_I ),J_bat (H_I ),J_elz (H_I ) y J_fc (H_I ) siguen lo expuesto en [1] y [2]. La solución del problema de optimización local da como resultado un conjunto de variables de optimización que viene dado por el vector U_local^opt=[■(P_(grid,local)^opt&P_(bat,local)^opt&■(z_(elz,local)^opt&z_(fc,local)^opt&■(δ_(elz,local)^opt&δ_(fc,local)^opt )))]
Gestión de la microrred incluyendo agentes externos
La función de coste introducida en las expresiones (1)-(7) puede ser extendida a una función de coste global para la microrred que intercambia energía con agentes externos, usando la expresión (8), como se introdujo en [3].
![]()
donde la función de coste del proceso de intercambio de energía, J_exch^DM, puede ser definida como:

donde P_exch (h_i) hace referencia al intercambio de potencia final entregado distribuido por la microrred y P_req^ext (h_i) es la potencia inicial requerida del agente externo. Hay que tener en cuenta que la restricción definida para calcular el balance de energía (7) debe ser reemplazada por la ecuación (10):

La solución proporcionada por la función global de la operación de la microrred con el agente externo debería tener un valor de coste que sea menor que la suma del valor proporcionado cuando se considera el intercambio de energía con el valor externo y el beneficio propuesto ofrecido por el agente externo. Esto puede ser expresado insertando la siguiente restricción en el controlador:
![]()
Con el objetivo de cumplir la restricción dada por la desigualdad (11) el problema debería ser formulado como una MIQQ (programación Integral Mixta con restricciones Cuadráticas). Este tipo de formulación requiere una gran complejidad y tiempo de resolución para el sistema de control. Por dicha razón, los términos cuadráticos de la función de coste definida en [1] van a ser linealizados siguiendo la formulación expresada en [3].
Formulación del “Load Shifting” usando MPC
El desplazamiento de carga (Load Shifting), puede ser una herramienta de flexibilidad, sobre todo a la hora de hacer una replanificación de la microrred con vista a satisfacer los requerimientos de potencia precisados por el agente externo. Un ejemplo claro de cargas desplazables en el tiempo pueden ser los vehículos eléctricos (si se considera agentes externos a la microrred), o bien electrodomésticos o cargas internas a la microrred que deben estar activos durante periodos de tiempo determinados por un número continuado de instantes de muestreo a lo largo de un intervalo de tiempo superior a la suma del total de instantes que requieren estar activos. La formulación de estas cargas dispone de los siguientes datos: i) Tiempo inicial de conexión a la microrred (t_(ini,ls)), ii) Tiempo final de conexión a la microrred (t_(end,ls)), iii) Nº total de instantes activos ((N_(t,ls))y iv) Potencia constante de consumo de la carga desplazable en el tiempo (P_ls). Para formular este problema la restricción de balance de energía (10) debe ser reformulada como sigue:

Se introducen la variable lógica δ_ls, la cual toma valor “1” cuando la carga desplazable en el tiempo esta activa y “0” cuando no consume potencia. De la misma forma se introduce la variable σ_(on,ls), que está activa en el instante en que la carga desplazable en el tiempo pasa de un estado inactivo a un estado de consumo de potencia (variable de arranque de la carga desplazable en el tiempo), que puede ser definida como:
![]()
La formulación completa del problema de “Load Shifting” se hace introduciendo las siguientes restricciones en el controlador.

Nótese que introduciendo las restricciones definidas con las expresiones (14) y (15), la carga puede o no activarse a lo largo del día, pero si se activa tiene que ser de manera continuada en el tiempo según el número de instantes requeridos por la carga a la que se aplica el load shifting. La variable δ_ls debe estar restringida a valores entre “0” o “1” ∀H_I∈[t_(ini,ls),t_(end,ls)] y debe fijarse a valor “0” ∀H_I∉[t_(ini,ls),t_(end,ls)].
Formulación del “Load Curtailment” usando MPC
El proceso de reducción de carga (o respuesta a la demanda) es otro de los mecanismos de flexibilidad que puede ofrecer la microrred, bien con cargas propias como por ejemplo los sistemas de almacenamiento de energía, pero también puede gestionarlo con agentes externos tales como vehículos eléctricos. Con la siguiente formulación se consigue gestionar la carga de un vehiculo eléctrico que no requiere de una carga constante pero que sí exige disponer de un estado de carga en el instante inicial. La microrred puede gestionar, por tanto, el intercambio de energía con este sistema de almacenamiento externo, cumpliendo siempre con el estado de carga final precisado por el agente externo. Esto puede repercutir en un precio inferior de recarga para el vehículo. Para introducir el problema de variación de carga en el controlador de la microrred la ecuación de balance de energía definida en (12), debe ser modificada como sigue:
![]()
Como se puede observar en la expresión (16), se tiene un producto mixto P_lc (H_I )∙δ_lc (H_I ) que da lugar a la variable z_lc (H_I ), siguiendo lo establecido en [4]. La función de coste en este caso quedaría
![]()
De la misma forma que el caso anterior, la formulación de estas cargas dispone de los siguientes datos: i) Tiempo inicial de conexión a la microrred (t_(ini,ls)), ii) Tiempo final de conexión a la microrred (t_(end,ls)), iii) Nº total de instantes activos ((N_(t,ls))y iv) Límites máximos y mínimos de la potencia de intercambio P_lc (H_I ) y v) 〖SOC〗_lc^req (t_(end,lc) )
La función de coste del proceso de intercambio de energía, J_lc^DM, puede ser definida como:

La nomenclatura seguida en la ecuación (18) sigue lo establecido en [1], donde CC_bat es el coste de adquisición de las baterías, Cycles_bat indica el número de ciclos de vida de las baterías, P_(bat,ch) y P_(bat,dis) es la potencia de carga y descarga de las baterías, η_(bat,ch) y η_(bat,dis) es el rendimiento en carga y descarga de las baterías. Cost_(degr,ch) y Cost_(degr,dis) son factores de cuantificación del coste de degradación de las baterías. La relación entre P_bat (H_I),P_(bat,ch) (H_I) y P_(bat,dis) (H_I).es fácil de obtener siguiendo [1]. Al igual que en el caso anterior La variable δ_lc debe estar restringida a valores entre “0” o “1” ∀H_I∈[t_(ini,lc),t_(end,lc)] y debe fijarse a valor “0” ∀H_I∉[t_(ini,lc),t_(end,lc)].
Resultados
El controlador ha sido desarrollado utilizando la herramienta CPLEX del software de optimización TOMLAB, el cual se integra directamente como toolbox de MATLAB.
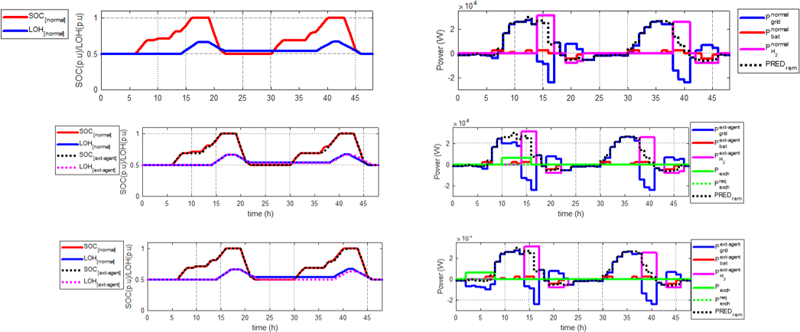
En la figura 2, se muestra la funcionalidad que dispone el sistema de gestión de energía (EMS, Energy Management System), ante el requerimiento de energía externo dado por un vehiculo eléctrico. Tal y como se muestra en dicha figura la microrred, bajo la restricción de instantes en los que el vehiculo está conectado, selecciona el mejor periodo para realizar la recarga de energía al vehículo. En la figura 3, se muestran los resultados de optimización de la microrred en primer lugar sin vehiculo externo conectado, con vehiculo conectado desde las 0h-24h, y por último el vehiculo con la restricción de que sólo esta conectado entre los instantes entre 0h-8h. El coste de recarga entre 0-24h, es de 1.91€ frente a 3.52€ si tiene que estar recargado antes de las 8h.
En la Figura 3, se muestra la funcionalidad que dispone el EMS de la microrred ante el requerimiento de energía externo dado por un vehículo eléctrico al que se le puede aplicar el load curtailment. Tal y como se muestra en la figura la microrred, bajo la restricción de instantes en los que el vehículo está conectado, selecciona el perfil de recarga optimo que minimice de igual forma los efectos de degradación en la batería del vehículo externo a la microrred garantizando de igual forma el coste económico óptimo del proceso de recarga. En este caso, el vehículo se recarga obteniendo un beneficio por la recarga de 2.5737€ en lugar de tener que pagar por la misma, al aportar flexibilidad a la microrred.

Conclusiones
La presente comunicación amplía las funcionalidades del EMS desarrollado por el CNH2, en entorno Matlab, que se ejecuta desde el propio SCADA de la microrred desarrollado en LABVIEW. La metodología seguida evalua el coste de planificación de la microrred atendiendo tanto a precios de energía, como al coste de uso de los sistemas de almacenamiento, tanto por ciclos de uso de las baterías, como por número de horas de funcionamiento del electrolizador y la pila de combustible, pero también atendiendo a criterios de degradación de las baterías propios de corrientes altas en carga y descarga, o bien al número de arranques y paradas o fluctuaciones de potencia en la pila de combustible y el electrolizador. El sistema es válido por tanto, para evaluar cuánto costaría intercambiar energía con un agente externo, como puede ser un agregador de energía, un vehículo eléctrico, otras microrredes vecinas o bien, los propios operadores de sistema. Esta flexibilidad puede ser aun mayor cuando se dota de la funcionalidad de desplazamiento o variación de consigna a cargas de consumo internas o externas a la microrred.
Agradecimientos
El presente trabajo ha sido realizado bajo el marco del proyecto CONFIGURA (DPI2016-78338-R) financiado por el Ministerio Español de Economía, Industria y Competitividad.
Referencias
- [1] Garcia-Torres, F. y Bordons, C. «Optimal economical schedule of hydrogen-based microgrids with hybrid storage using model predictive control.» IEEE Transactions on Industrial Electronics 62.8 (2015): 5195-5207.
- [2] Garcia-Torres, F., Valverde, L. y Bordons, C. Optimal load sharing of hydrogen-based microgrids with hybrid storage using model-predictive control. IEEE Transactions on Industrial Electronics, 2016, vol. 63, no 8, p. 4919-4928.
- [3] Garcia-Torres, F., Vilaplana, D., Bordons, C, Roncero,P. y Ridao, M. Optimal Management of Microgrids with External Agents including Battery/Fuel Cell Electric Vehicles. IEEE Transactions on Smart Grids, 2018, vol. PP, no PP, p. PP-PP.
- [4] Bemporad, A. y Morari, M. «Control of systems integrating logic, dynamics, and constraints.» Automatica 35.3 (1999): 407-427.