Comunicación presentada al V Congreso de Smart Grids
Autores
- Pedro Llorens Saurina, Director de Desarrollo Negocio, SPASA (Servicios Politécnicos Aéreos)
- Rafael Alonso Ponce, Investigador, Fora forest technologies
- Julio Diéguez, Director Técnico, SPASA (Servicios Politécnicos Aéreos)
- José María Lara Cabeza, Director de Producción, SPASA (Servicios Politécnicos Aéreos)
- Iñigo Lizarralde Torre, Fundador, Fora forest technologies
- Francisco Rodríguez Puerta, Fundador, Fora forest technologies
Resumen
Las inspecciones con LiDAR aerotransportado son clave para garantizar la continuidad y la seguridad de la operación de las líneas de transporte de electricidad. Aunque es una técnica madura, las bajas prestaciones de los primeros sensores, su elevado precio, baja disponibilidad en el mercado y las limitaciones meteorológicas, han derivado en una operativa innecesariamente lenta y costosa. El estudio muestra cómo mejorarla, aprovechando los avances en la tecnología LiDAR, que permiten utilizar plataformas aéreas más rápidas y económicas, en combinación con el uso de modelos de crecimiento de vegetación para predecir con precisión el momento más apropiado para realizar las labores de mantenimiento de vegetación y su localización a nivel de vano.
Palabras clave
LiDAR, Modelos Crecimiento, Mantenimiento, Líneas de Transporte, Poda
Introducción
El LiDAR aerotransportado se utiliza para la obtención de modelos digitales de la superficie terrestre (MDS) desde aeronaves mediante telemetría láser, reemplazando a los métodos fotogramétricos tradicionales. El LiDAR tiene la capacidad de modelizar objetos suspendidos en el aire como hojas de árboles, conductores de líneas eléctricas, elementos de un apoyo de una línea eléctrica, etc., el suelo bajo esos elementos y otros objetos suspendidos entre ambos. Por ello, además de las obvias aplicaciones en inventario forestal, el LiDAR es la herramienta ideal para detectar las posibles interferencias entre conductores y la vegetación u otros objetos situados en el corredor de seguridad de las líneas eléctricas, y así se lleva utilizando durante más de quince años.
Las limitadas prestaciones de los primeros sensores LiDAR comercializados impusieron metodologías y estrategias de trabajo que implicaban elevados costes y dilatados plazos. Actualmente las prestaciones de los equipos han evolucionado notablemente lo que permitiría mejorar esas metodologías y adoptar nuevas estrategias. El estudio muestra como se pueden aprovechar esas mejoras para optimizar las labores de captura de datos y como refinar la planificación de éstas mediante el uso predictivo de modelos de crecimiento de la vegetación, que pueden elaborarse con mayor precisión gracias a la optimización de la captura masiva de datos LiDAR.
Prestaciones de los sistemas LiDAR
Requisitos de los vuelos LiDAR para inspección de líneas eléctricas
La captura de datos LiDAR en el corredor de seguridad de una línea eléctrica pretende modelizar la vegetación y los conductores para poder medir con precisión las distancias entre ambos, lo que requiere:
- Gran densidad de puntos: Es necesaria para caracterizar adecuadamente la vegetación debería ser, como mínimo, de 5 a 10 pts/m2, aunque en las especificaciones se suele pedir de 15 a 25 pts/m2 en un mínimo del 75% al 95% del área capturada. La captura de los conductores puede requerir estrategias específicas. La densidad se puede definir con el espaciado longitudinal y el espaciado transversal, distancia entre ecos a lo largo de la trayectoria y en dirección perpendicular (o en la dirección del barrido), respectivamente.
- Alta potencia de emisión del láser: La captura de vegetación y conductores se basa en la capacidad del LiDAR de capturar múltiples ecos o retornos de un mismo pulso láser. El LiDAR trabaja detectando la luz difusa reflejada en todas direcciones por los objetos al incidir el láser, de la cual sólo se recibe una mínima parte en el receptor. Los múltiples ecos aparecen cuando un objeto como una hoja de un árbol o un cable aéreo sólo cubren una fracción de la huella del pulso incidente, por lo que se obtiene un eco (de baja intensidad pues sólo corresponde a una fracción del haz) y el pulso sigue su camino hacia el suelo pudiendo encontrarse con otros objetos que causen nuevos ecos sin detener totalmente el pulso. Como la potencia del haz va disminuyendo con cada interferencia y el eco será menor cuanto menor sea la superficie sobre la que ha incidido el haz, la energía recibida de vuelta en el sensor puede ser muy baja por lo que una alta potencia de emisión es básica para poder utilizar la característica multieco. También hay que tener en cuenta que la potencia de emisión de los pulsos láser disminuye exponencialmente con el aumento de la frecuencia de pulsación.
Parámetros que definen la operación del sensor
A continuación, se describe como afectan los parámetros del sensor LiDAR y del vuelo a las características de los datos obtenidos. Para mostrar la evolución de los sistemas se citan datos comparativos de tres sensores: ALS50 de 2004, ALS80HP de 2016 y TerrainMapper de 2018; todos ellos de Leica Geosystems (parte de Hexagon). Los demás fabricantes de equipos aerotransportados de gran formato, Teledyne-Optech y Riegl, disponen de equipos con prestaciones y evolución que permitirían un estudio similar. Por su menor potencia y alcance, no se incluyen otros equipos de menor tamaño como Velodyne, ampliamente utilizados en drones y en automóviles autónomos, que merecerían un estudio separado.
La densidad de puntos queda definida por dos parámetros propios del sensor y otros propios del proyecto: la frecuencia de pulsación, PR (nº de pulsos emitidos por unidad de tiempo), la frecuencia de escaneo, SR (nº de barridos transversales del haz láser por unidad de tiempo), el FOV (campo de visión o apertura transversal del barrido) o el ancho del barrido sobre el terreno, W; y la velocidad de la aeronave sobre el suelo, GS. Adicionalmente influyen otros factores como la altura h, la potencia del emisor, el tipo y patrón de barrido, etc.

Frecuencia de pulsación PR
La densidad es directamente proporcional a la frecuencia de pulsación. Los primeros sistemas comercializados trabajaban a frecuencias de unas pocas decenas de KHz (53KHz en el ALS50 de 2004 y 150KHz en versiones posteriores). Las mejoras en los emisores de pulsos láser a base de diodo y en la electrónica han permitido llegar a frecuencias del orden del MHz. Se han conseguido frecuencias mayores lanzando dos pulsos simultáneamente, utilizando un prisma (splitter) que descompone el pulso en dos. Hay que tener en cuenta que la potencia de cada pulso será la mitad de la del pulso original. ALS80 utiliza este sistema para conseguir una pulsación de 1MHz desde 2016. TerrainMapper llega a 2MHz.
Frecuencia de escaneo o barrido SR
El espaciado longitudinal no depende de la frecuencia de pulsación, sino de la frecuencia de barrido o escaneo SR, Δlong = GS / SR y del mecanismo utilizado. El LiDAR realiza un barrido bidimensional del terreno, en sentido logitudinal o paralelo al vuelo; y en sentido transversal o perpendicular al vuelo. El barrido longitudinal lo realiza la propia aeronave con su movimiento de avance, mientras que el barrido transversal se realiza con ayuda de un espejo o de un prisma móvil que deflecte los pulsos láser. El sistema más habitual de barrido utiliza un espejo basculante. Dado que sigue un movimiento alternativo, se detiene en los extremos del campo de visión para acelerarse al máximo a su paso por la vertical. Por ello, está sujeto a fuertes inercias que limitan la frecuencia máxima de escaneo y, además, hacen que ésta dependa del FOV, disminuyendo SR al aumentar FOV. Se podría pensar en reducir el tamaño del espejo para reducir la inercia, pero se necesita que sea lo más grande posible para capturar la máxima energía del retorno del pulso. Actualmente se consiguen frecuencias de barrido mayores con mejoras mecánicas en el mecanismo del espejo y con aumentos de potencia que permiten reducir el tamaño del espejo. Así SRmax del ALS50 era 70Hz y la frecuencia máxima de oscilación del espejo en ALS80 es 200Hz, pero la frecuencia de escaneo efectiva se duplica por utilizar dos pulsos, y por tanto dos barridos, SRmax (ALS80) = 400Hz. TerrainMapper llega a 250Hz, pero independiente del FOV.
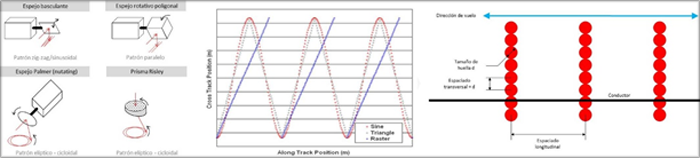
En la figura 1a se muestran los mecanismos de barrido más comunes. Tras el espejo basculante, el espejo rotativo poligonal (4 u 8 espejos montados sobre un prisma cuadrangular u octogonal) es el segundo más utilizado. Realiza una rotación continua por lo que permite velocidades de giro mayores, pero presenta fuertes pérdidas de pulsos y ecos en las aristas del prisma lo que reduce notablemente la frecuencia de pulsación efectiva con respecto a la nominal. Para evitar los inconvenientes de estos dos tipos de espejo, se está recurriendo al barrido Palmer o “nutante” de rotación continua, que, en lugar de un patrón de barrido lineal perpendicular a la trayectoria, describe un patrón circular (realmente elipse pues el eje de giro está ligeramente inclinado en un plano vertical alineado con la trayectoria). TerrainMapper utiliza este tipo de barrido.
Campo de visión FOV
Ya se ha comentado que, en el sistema de espejo basculante, debido a la inercia, el aumento del campo de visión causa una reducción de la frecuencia máxima de barrido. Así en el ALS50 la SRmax baja de 70Hz con un FOV de 10° a 24Hz a FOV 75°, pasando por 36Hz a FOV 40° mientras que en ALS80 va de 400Hz con FOV 10° a 150Hz con FOV 75°. Terrain Mapper, por utilizar barrido Palmer, sólo tiene dos opciones de FOV, 40° y 20°, pero no afectan a la frecuencia de escaneo.
Patrón de barrido
Los sistemas de espejo basculante, por su movimiento alternativo, describen un patron de barrido sinusoidal sobre el terreno. Por el movimiento alternativo del espejo, su velocidad no es constante y en su paso por la vertical va a máxima velocidad, resultando un espaciado transversal máximo (o densidad mínima), mientras que, en los extremos del barrido, el espejo se detiene para cambiar de sentido de giro y así el espaciado transversal es mínimo. La densidad en el eje puede llegar a ser un 40% inferior que en los extremos del barrido. Por ello, en los últimos años se ha introducido la disponibilidad de diferentes tipos de barrido de comportamiento más lineal que el sinusoidal. En ALS80 (fig. 1b) se dispone, además del barrido sinusoidal habitual, de barrido triangular, similar al sinusoidal pero más lineal y con un espaciado más uniforme, y del barrido llamado raster, que consigue gran linealidad y uniformidad a base de escanear sólo en una dirección mientras que en el barrido de retorno no se escanea, por lo que se reduce la frecuencia de escaneo efectiva a la mitad.
Velocidad sobre el terreno GS
Puede verse que la densidad es inversamente proporcional a la velocidad de la aeronave con lo que reduciendo esa velocidad podemos aumentar la densidad, compensando la falta de prestaciones del sensor. Esto fue habitual en los principios del uso del LiDAR. Dado que un avión de ala fija no puede volar a mucho menos de 100kts (185Km/h) y se requerían velocidades muy bajas (entre 20 y 70Km/h) se hizo habitual el uso de helicóptero, pero actualmente es casi innecesario y se puede realizar casi cualquier trabajo con avión.
Potencia emitida
Por una parte, la potencia máxima de emisión limita la frecuencia de pulsación y, por tanto, la densidad, puesto que la potencia emitida decrece exponencialmente con la frecuencia de los pulsos. Por otra, se requiere emitir altas potencias para mantener la capacidad de recibir multiples ecos. Las mejoras en los sistemas de emisión láser han permitido incrementar la potencia emitida para evitar las limitaciones ligadas a su carencia. De hecho, sistemas como los ALS tienen tal potencia que necesitan disponer de atenuadores para que la operación del LiDAR a baja altura no sea peligrosa para los ojos de las personas en el campo de visión del haz láser.
Altura de vuelo (sobre el terreno) h
Aparentemente, la principal limitación ligada a la altura se refiere a la potencia necesaria para que el eco recibido en el sensor sea detectable, pero existe otra limitación más importante: Los primeros sensores LiDAR sólo podían manejar un pulso simultáneamente y así no podían disparar un pulso hasta haber recibido el eco del anterior. Parece que la velocidad de la luz, c, es tan alta como para no imponer ninguna limitación pero en un vuelo a una altura h = 1.000m, la luz tarda en recorrer ida y vuelta 1.000m x 2 / 300.000m/s = 6,67 μs, lo que limitaría el número de pulsos por segundo a 150.000, es decir, PRmax = 150KHz, y eso sin tener en cuenta el retardo de la electrónica del sensor ni que en todo barrido, el pulso tiene que recorrer una distancia R mayor que en la vertical para llegar al suelo, Rmax = h / cos(FOV/2). Por tanto, PRmax = c x cos(FOV/2) / h.
Por ello, se introdujo la técnica “multiples pulsos en el aire” MPiA (Multiple Pulse in Air), que, a base de duplicar y multiplicar la electrónica del equipo, permite lanzar y gestionar varios pulsos al aire antes de que el primero vuelva al receptor. Inicialmente, la técnica MPiA no supuso una mejora tan grande como sería de esperar pues limitaba notablemente el rango de alturas a las que capturaba el sensor por lo que sólo podía utilizarse sobre áreas con variaciones de altitud del terreno reducidas. Otra limitación era la imposibilidad de utilizar MPiA en vuelos bajos como los que se realizaban sobre líneas eléctricas. En los últimos años se ha aumentado el número de pulsos en el aire que puede manejar un sistema MPiA, v.g. desde 2 PiA en ALS50phase2 hasta los 6 PiA de ALS80HP y 35 PiA en TerrainMapper por lo que MPiA es utilizable en todo el rango de alturas de trabajo del sensor.
Al planificar, es habitual probar diferentes configuraciones de altura y FOV que resulten en la misma anchura de banda.
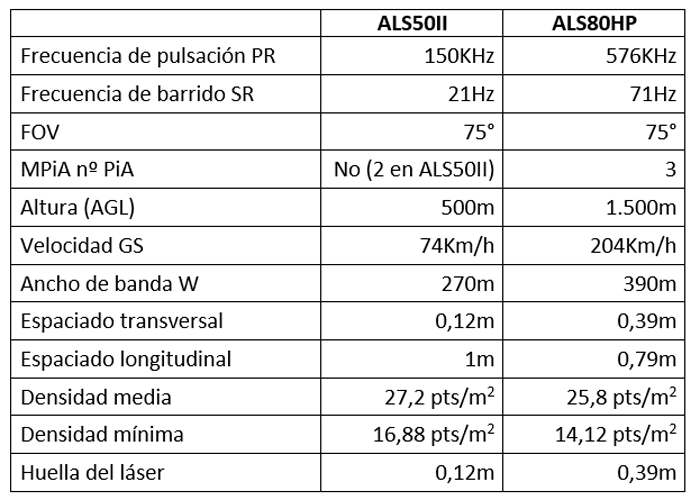
Proyecto comparado
En la tabla siguiente se muestran los parámetros y resultados obtenidos para un proyecto con la especificación habitual en líneas de transporte como las indicadas al principio de este capítulo. Se ha calculado con AeroPlan, el software de planificación de vuelos de Leica Geosystems. Dado que los parámetros operativos del LiDAR están fuertemente correlados entre sí y la variación de uno afecta a los demás, la planificación de un proyecto es siempre iterativa. Puede verse que los resultados de espaciados y densidad son similares pero con un vuelo mucho más sencillo y rápido de realizar con un sensor ALS80, aun comparando con un sensor ALS50 mejorado a 150KHz. En los vuelos LiDAR para captura de líneas de alta tensión se ajustan los parámetros de manera que e obtenga un espaciado transversal igual al diámetro del haz del pulso láser, con lo que se consigue que los pulsos transversales sean contiguos asegurando la captura del conductor (Fig. 1.c). En los sensores estudiados, la huella del pulso tiene un diámetro de 12-13cm a 500m y 23-25cm a 1.000m. Se podría trabajar con espaciados transversales mayores considerando que si el espaciado es n veces el diámetro del haz, será de esperar que se capture el conductor cada n barridos. Con un valor de n=2 o n=3 todavía dispondríamos de ecos en el conductor como para caracterizar sobradamente la catenaria:
Modelización del crecimiento de la vegetación
Los avances en la tecnología LiDAR mostrados anteriormente son la base que permite un mayor desarrollo de nuevas técnicas de modelización forestal que hasta la irrupción del LiDAR se habían basado exclusivamente sobre trabajo de campo.
Una de las principales ventajas de la implantación de la tecnología LiDAR en el sector forestal, además de la precisión de la información para inventarios, es el cambio que ha supuesto en cuanto al uso de datos y el coste para el desarrollo de ecuaciones que predigan el comportamiento de la vegetación, principalmente, el crecimiento La modelización forestal en España daba sus primeros pasos a principios del S.XX, si bien no fue hasta la década de los años cuarenta cuando comenzaron a publicarse las primeras tablas de producción (Bravo et al., 2011). De la misma manera que la llegada del LiDAR ha supuesto un cambio de paradigma en el inventario forestal, el desarrollo de los paquetes estadísticos y el aumento de la potencia de computación ha permitido, en los últimos veinte años, un extraordinario avance en el desarrollo de modelos de crecimiento para las principales especies forestales y en la práctica totalidad de territorios. Durante ese desarrollo, se priorizó principalmente la creación de ecuaciones o modelos que permitieran conocer la producción de los principales sistemas forestales, ya que se buscaba el objetivo de predecir la producción de madera. Con el paso del tiempo, los objetivos de la modelización fueron avanzando hacia variables como el crecimiento para luego derivar en otros aspectos como la estructura de la vegetación.
En lo relativo al crecimiento, la gran mayoría de modelos se desarrollaron para estimar el crecimiento en diámetro, como variable de más fácil medición en campo y como base para el conocimiento de otras variables necesarias para la planificación forestal. En España se han desarrollado relativamente pocos modelos de crecimiento en altura. Por otro lado, la modelización de otros aspectos de la estructura de la vegetación que podrían ser interesantes para su uso en bosques junto a líneas eléctricas, como los modelos de copa (anchura de la copa, altura de inicio de la copa viva, etc.) tampoco ha tenido un desarrollo demasiado amplio.
Con la llegada de la aplicación de la información LiDAR al sector, inicialmente para el inventario forestal como base para la toma de decisiones de gestión y planificación, el desarrollo de modelos ha tomado nuevos caminos en los que las características de la información de base (información tridimensional) y, sobre todo, el volumen de información disponible, han hecho que se puedan desarrollar modelos muy precisos tanto para la gestión forestal clásica, como para aspectos más avanzados pero igualmente necesarios e importantes como los modelos de combustible o los sistemas de mantenimiento de la vegetación alrededor de las líneas eléctricas.
El enorme desarrollo de la modelización forestal basada en LiDAR no sólo viene de la combinación de nuevos y potentes sistemas de adquisición de datos, tal y como se ha mostrado anteriormente, junto con la potencia computacional a nivel estadístico. La muy alta correlación que muestra la estructura de la vegetación con diversos estadísticos LiDAR (Naesset, 2002) provenientes de eficaces técnicas de clasificación y procesado de la información LiDAR es también una importante razón para el avance en modelización forestal basada en información LiDAR. Así, puede decirse también que los avances en la tecnología de los sensores aerotransportados junto con las mejoras en la configuración de parámetros de vuelo, etc., supone un claro punto de inflexión para su aplicación en la planificación de las labores de mantenimiento de la vegetación en líneas eléctricas.
Estas herramientas de planificación de labores de mantenimiento requieren una estimación muy precisa del desarrollo de la vegetación, principalmente en cuanto al crecimiento en altura y el desarrollo de la copa de los árboles. La gran correlación apuntada entre los parámetros altitudinales de la vegetación y los estadísticos extraídos de un procesado concreto de la información LiDAR con objetivos forestales, nos dan una buena idea de una situación de partida.
Esta situación de partida puede servir para tomar ciertas decisiones en cuanto a la planificación del mantenimiento de la vegetación en líneas eléctricas, simplemente por una clasificación de alturas y tamaños. Sin embargo, la planificación futura de estas labores de mantenimiento debe basarse, sin duda, en la estimación del desarrollo de esa vegetación, principalmente en altura. Para poder tener esa estimación futura es totalmente necesario el desarrollo de modelos de crecimiento en altura muy precisos. Para ese desarrollo, es necesario tener información de dos momentos temporales diferentes, de manera que se pueda extraer y analizar la información existente en cada momento y conocer el cambio entre ambos momentos. Para ello se requiere la información LiDAR de dos vuelos con características estables sobre la misma zona y con la misma metodología de clasificación y procesado de la información LiDAR que permita comparativas estadísticamente robustas y, derivado de ello, desarrollos de modelos de crecimiento aplicables a grandes áreas.
El presente estudio propone la realización de dos vuelos en diferentes momentos sobre zonas piloto que sirven como base para su posterior extrapolación a una población más grande. Con los avances en los sensores y los sistemas de adquisición de información LiDAR, unido al constante desarrollo de nuevas técnicas de modelización forestal basadas en el tratamiento de grandes cantidades de información, se pueden obtener, de forma estable, grandes cantidades de información en pares de datos en diferentes momentos. Una de las principales ventajas de los avances en los sensores y sus plataformas es que se aumenta la precisión y se reduce el coste que permite realizar vuelos con los intervalos de tiempo necesarios para los objetivos buscados en cada caso. Además, estos avances aseguran una estabilidad de los datos para su análisis conjunto en diferentes tiempos.
A partir de ahí, se desarrollan modelos de crecimiento basados en información LiDAR en dos momentos temporales. Estos modelos tienen una doble base: por un lado, el enorme desarrollo de ecuaciones que relacionan diversas variables de estructura de la vegetación con combinaciones de estadísticos LiDAR. Por otra, la evolución de los modelos de crecimiento tradicionales hacia modelos de crecimiento con mucho mayor volumen de información y con necesidades diversas frente a los modelos estáticos y basados simplemente en la producción forestal del pasado.
Conclusiones
El aprovechamiento de las prestaciones de las últimas generaciones de sensores LiDAR permitiría realizar gran parte de los trabajos de mantenimiento de líneas de transporte con aeronaves de alas fijas y a velocidades de unos 110-120 kts con lo que los tiempos de ejecución podrían reducirse a la tercera parte. La capacidad de los nuevos sistemas MPiA para mantener sus prestaciones en un rango de alturas permitiría el vuelo a altura constante (algo casi obligado en aviones de alas fijas) aun con desniveles de 200-300m en el terreno, evitando volar siguiendo el terreno y el uso de helicóptero. La posibilidad de cubrir un ancho de banda casi doble que la exigida en los pliegos, también permitiría reducir el número de pasadas al evitar algún giro suave entre apoyos. Por todo ello podría realizarse en un año la inspección LiDAR completa de toda la red de REE. Se obtendría un ahorro de costes doble, tanto por la reducción de plazos como por el uso de avión de alas fijas, de operación más económica y sencilla que el helicóptero. Téngase en cuenta que las empresas de vuelo fotográfico vertical y LiDAR disponen de aviones adaptados para el montaje del LiDAR pero no de helicópteros por lo que no sólo hay que alquilarlo sino también adaptarlo.
El uso de modelos de crecimiento de vegetación permite estimar el desarrollo de la vegetación bajo líneas eléctricas de forma precisa y, lo que es más importante, de forma espacialmente continua sobre la totalidad de la superficie sobre la que están instaladas las líneas eléctricas. Esta información precisa, continua en el espacio y con estimaciones futuras de desarrollo permite desarrollar nuevas herramientas de optimización de la planificación del mantenimiento de estas líneas, sobre todo en cuanto a planificar mejor las necesidades de mantenimiento en campo. Son labores muy costosas que requieren una estimación precisa del desarrollo de la vegetación, de manera que se optimicen los recursos necesarios para el mantenimiento.
Agradecimientos
Agradecemos a Ron Roth, Product Manager Airborne Topographic LiDAR en Leica Geosystems part of Hexagon y padre de los primeros sistemas LiDAR aerotransportados, por toda la información técnica e histórica proporcionada.
Referencias
- Bravo, J. G. Alvarez-Gonzalez, M. del Rio, M. Barrio, J. A. Bonet, A. Bravo-Oviedo, R. Calama, F. Castedo-Dorado, F. Crecente-Campo, S. Condes, U. Dieguez-Aranda, S. C. Gonzalez-Martinez, I. Lizarralde, N. Nanos, A. Madrigal, F. J. Martinez-Millan, G. Montero, C. Ordoñez, M. Palahi, M. Pique, F. Rodriguez, R. Rodriguez-Soalleiro, A. Rojo, R. Ruiz-Peinado, M. Sanchez-Gonzalez, A. Trasobares and J. Vazquez-Pique; 2011. Growth and yield models in Spain: historical overview, contemporary examples and perspectives. Forest Systems 2011 20(2), 315-328
- Naesset; 2002. Predicting forest stand characteristics with airborne laser using a practical two-stage procedure and field data. Rem. Sens. Environ. 80, 88-99.
- AA., 2016, Leica AeroPlan User Manual, Version 12.1.2.