Comunicación presentada al VII Congreso Smart Grids
Autores
- Pilar Calatayud Martí, Ingeniero I+D, Instituto Tecnológico de la Energía (ITE)
- Mario Montagud Aguar, Ingeniero I+D, Instituto Tecnológico de la Energía (ITE)
- Lucía Arcos Usero, Ingeniero I+D, Instituto Tecnológico de la Energía (ITE)
- Dr. Julián Camilo Romero Chavarro, Ingeniero I+D, Instituto Tecnológico de la Energía (ITE)
- Dra. Marta García Pellicer, Directora, Instituto Tecnológico de la Energía (ITE)
Resumen
La integración del vehículo eléctrico (EV) es una pieza clave en la transición energética. Sin embargo, una alta penetración del EV supone un incremento de la demanda eléctrica con posibles consecuencias negativas sobre las redes de distribución. Para evitarlo, es necesario digitalizar las infraestructuras de recarga para ofrecer mecanismos de carga controlada con el objetivo de minimizar el impacto en la red y gestionar de manera activa y eficiente los recursos. En este artículo se presenta un piloto real de recarga con mecanismos de monitorización y de control de carga, en el que se muestran las ventajas de tener una infraestructura monitorizada, digitalizada y gestionada, así como los efectos que esto tiene sobre la red.
Palabras clave
Digitalización, Gestión de Activos, Piloto de recarga, Vehículo Eléctrico, Estaciones de recarga, Monitorización, Mecanismos de carga controlada, Electrificación de la Movilidad, PMU.
Introducción
La concienciación de la sociedad acerca del cambio climático y necesidad de reducir emisiones de gases de efecto invernadero (GEI) se ha visto incrementada en los últimos años, lo cual queda patente en el establecimiento de políticas y estrategias a diferentes niveles para lograr una economía descarbonizada y mantener el aumento de la temperatura global del planeta por debajo de 2ºC (Comisión Europea, s.f.). Un ejemplo de ello es la hoja de ruta para 2050 de la Unión Europea, que tiene como objetivo reducir las emisiones de GEI un 80% con respecto a los valores de 1990 (Comisión Europea, 2011). Para ello, resulta de vital importancia la electrificación de los consumos que, tradicionalmente, han utilizado combustibles fósiles como fuentes de energía, así como lograr un mix energético de alta contribución de fuentes de energía renovables. Así pues, se demuestra el papel del vehículo eléctrico (EV, por sus siglas en inglés) como pieza clave en la transición hacia una economía neutra en emisiones de GEI.
Sin embargo, una alta penetración de energía eléctrica, tanto de fuentes renovables como del EV, si sucede de forma descontrolada, puede tener consecuencias negativas para la red eléctrica. Por un lado, las fuentes de energía renovables son intermitentes y, de no tratarse esta incertidumbre, pueden ocasionar problemas de estabilidad, fiabilidad y calidad de la energía eléctrica en la red (Mesaric & Krajcar, 2015). A su vez, un aumento masivo en la demanda del EV supone un incremento importante de la demanda de electricidad y, si la carga no se hace de manera planificada y controlada, puede tener consecuencias negativas sobre las redes de distribución tales como: aumento de las caídas de tensión, congestión de las líneas, aumento de pérdidas, disminución de la vida útil de los transformadores y aumento de los niveles de desequilibrio (Maza Ortega & Gómez Expósito, 2019). Una posible solución para minimizar el impacto negativo de este aumento de EV es aumentar las inversiones asociadas a activos clásicos de la red (Maza Ortega & Gómez Expósito, 2019) y dimensionar el sistema para cubrir los picos de demanda (Mesaric & Krajcar, 2015). Sin embargo, esta solución no es eficiente, por lo que son necesarias otras medidas.
El EV puede considerarse como un sistema de almacenamiento energético dinámico que, mediante algoritmos de carga controlada y la posibilidad de inyectar energía a la red (Vehicle-to-Grid, V2G), puede ofrecer servicios auxiliares, aportando flexibilidad para favorecer el aumento de la energía de origen renovable en el mix energético, de manera que se puedan minimizar los problemas ocasionados por la variabilidad de este tipo de recursos energéticos (Frías & Román, 2019). Esta solución, aunque prometedora, requiere que tanto el EV como la estación de recarga (EVSE, por sus siglas en inglés) permitan este modo de operación (V2G), lo cual incrementa el coste y requisitos de instalación de estas. Además, esta modalidad de carga requiere una gestión del proceso de recarga mucho más exhaustiva, ya que se deben coordinar los requisitos de carga del usuario con las necesidades de flexibilidad de la red. Por esta razón, se ha mostrado un gran interés en desarrollar modelos y metodologías de control para la integración masiva de los VEs en la red (Al-Ogaili, et al., 2019), mediante técnicas y algoritmos de planificación, agrupamiento y predicción de la recarga capaces de resolver problemas de estabilidad y desbalance en la red, caracterizar los diferentes procesos de recarga, y prevenir situaciones de fallo.
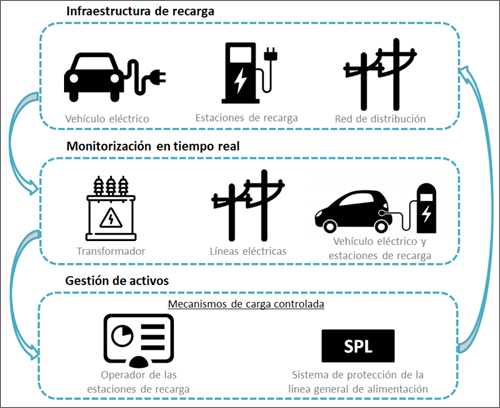
Sin embargo, para una integración eficiente del EV en la red mediante técnicas y algoritmos de planificación que incluyan tanto modos de carga unidireccional como bidireccional (V2G), es necesaria la digitalización de los principales activos de la infraestructura de recarga que permita la gestión en tiempo real (Fig. 1). Por ello, en el presente artículo se muestra como ejemplo de digitalización un piloto real de infraestructura de recarga del EV que permite realizar un control dinámico de esta, a la vez que analizar el impacto del EV en la red eléctrica y corroborar la necesidad de monitorizar la infraestructura de recarga e introducir mecanismos de carga controlada.
Infraestructura de recarga
El piloto propuesto en este artículo incluye pruebas realizadas en un entorno real de infraestructura de recarga, que incluye tanto la red eléctrica real como los EV y sus estaciones de recarga (EVSE), describiéndose cada uno de estos componentes en las siguientes subsecciones. A su vez, para analizar el impacto del EV en la red, se presentan seis casos de test o ensayos del piloto de recarga, variando la potencia demandada (mediante la conexión y desconexión de las EVSE) y la localización de las EVSE con respecto al punto de conexión a red.
Vehículo eléctrico (EV)
El piloto cuenta con dos EV cuyas características se muestran en la Tabla I. Cabe mencionar que, para ambos VE considerados, cuando se trata de los modos de carga 2 y 3, sólo permiten carga monofásica.

Estaciones de recarga (EVSE)
Las EVSE utilizadas en el piloto son de carga unidireccional y con las características de tensión, corriente y potencia nominales mostradas en la Tabla II. La conexión escogida entre los EV y las EVSE es la siguiente: EV1 con EVSE1 y EV2 con EVSE2. Dado que el piloto es un ejemplo de digitalización de la infraestructura de recarga en el que se pretende analizar el impacto del EV en la red, ambas estaciones cargarán a su potencia nominal, siendo que la EVSE2 cargará a 7,3 kW, dado que el EV2 únicamente permite carga monofásica en CA, como se ha mencionado anteriormente.

Red de distribución
La red eléctrica a la que se conectan las EVSE descritas es la red del Laboratorio de Interoperabilidad de las instalaciones del Instituto Tecnológico de la Energía (ITE). Dicho laboratorio, partiendo de uno o dos centros de transformación (CT) de 250 kVA, cuenta con un entramado de hasta 4km de cable conductor, simulando así la línea de distribución eléctrica, así como con múltiples puntos de conexión de cargas acoplados a él (entre ellas, EV a través de EVSE) con sus respectivos contadores inteligentes, simulando la red de un entorno real de baja tensión.
La conexión de las EVSE a la red eléctrica depende del caso de test, siendo que en cada uno se conecta una o dos EVSE y estas se sitúan próximas o alejadas del CT (Tabla III). Los casos en los que estas se sitúan alejadas del CT, las distancias a este son: 2 km para la EVSE1 y 3,75 km para la EVSE2.

Monitorización en tiempo real
La infraestructura de recarga del EV es sensorizada para una monitorización en tiempo real según se indica en las siguientes subsecciones. Las variables analizadas en todos los puntos de medición del piloto de recarga son tensión y corriente, pues un impacto negativo del EV en la red se ve reflejado en altas caídas de tensión y sobrecargas de líneas y del transformador.
Vehículo eléctrico y estaciones de recarga
Las dos EVSE del piloto de recarga son monitorizadas mediante un analizador de redes que cuenta con un período de muestreo de tensión y corriente de 10 segundos.
Transformador y líneas eléctricas
La red se monitoriza en dos puntos de interés: 1) el lado de baja tensión del CT (cabecera) y 2) en la conexión de la línea de alimentación de la EVSE2 a la red eléctrica del Laboratorio de Interoperabilidad (MR3). Los instrumentos de medida utilizados son dos unidades de medida fasorial (PMU) con una frecuencia de muestreo de 50 mediciones por segundo.
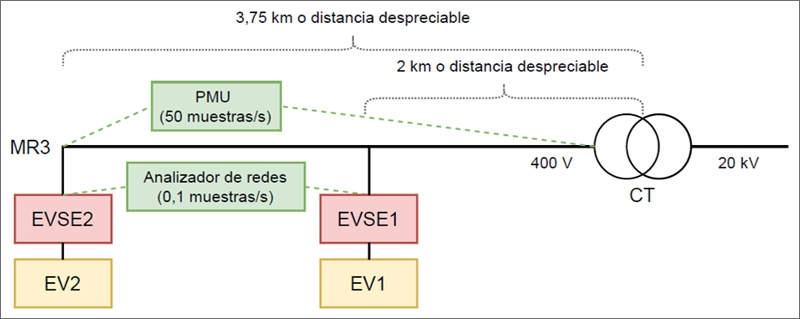
En la Fig. 2 se muestra un esquema del piloto descrito, donde se representan los puntos de medición de cada uno de los instrumentos de medida, así como la localización de las dos EVSE en la red eléctrica.
Gestión de activos
La gestión definida para el piloto presentado es una gestión sencilla de control ON/OFF de las EVSE. Tal como se muestra en los casos de test en la Tabla III, en los dos primeros casos ambas EVSE estarán conectadas; en los casos 3 y 4, se desconecta la EVSE2 mientras la EVSE1 se mantiene en conectada, y en los casos 5 y 6 se desconecta la EVSE1 y se conecta la EVSE2.
Resultados del piloto
Los resultados de tensión media en cada uno de los casos se indican en la Tabla IV, donde el punto 1 representa la EVSE1, el punto 2 corresponde a la EVSE2 y el punto 3 a cabecera del CT.
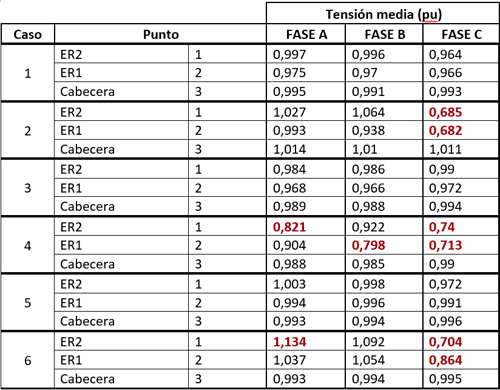
Debido a que la EVSE1 suministra en modo 4 (carga rápida en CC con alimentación trifásica) y la EVSE2 suministra en modo 3 (CA, monofásica por requisito del EV2), las tres fases de la red a la que se conectan están desequilibradas, siendo la fase C la que sufre una mayor caída de tensión al ser la que suministra a ambas EVSE conjuntamente.
Por una parte, los casos más desfavorables son aquellos en los que las cargas se sitúan alejadas del CT, llegando en muchos casos a valores inadmisibles, sobre todo en la comentada fase C. Por otro lado, analizando las corrientes en cabecera del CT, en ningún caso las fases están sobrecargadas. La corriente nominal por fase en el lado de baja tensión del CT es de 360A (potencia aparente nominal de 250kVA) y la de suministro de las EVSE es de 72A en la EVSE1 y de 32A en la EVSE2. Por tanto, como en las fases A y B sólo demanda energía la EVSE1, si esta trabaja en condiciones cercanas a las de diseño, el nivel de carga en el CT debe ser en torno al 20% en esas fases. En la fase C, al sumarse la energía demandada por la EVSE2, el nivel de carga en el CT trabajando ambas EVSE cerca de las condiciones de diseño es de aproximadamente el 30% (cuando solamente la EVSE2 está suministrando energía, el nivel de carga esperado en cabecera del CT en la fase C es del orden del 9%).
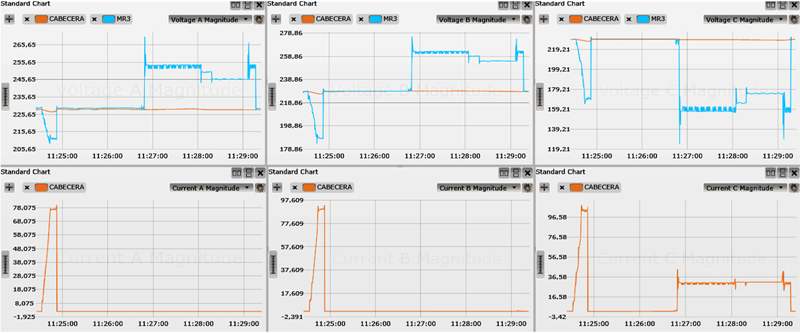
Cabe destacar que, en los casos donde las cargas están alejadas del CT (casos 2, 4 y 6), las estaciones no han trabajado en sus condiciones de diseño, experimentando una gran variabilidad en sus niveles de tensión y llegando a dar mensajes de error e incluso a detener el proceso de carga. Esto se puede apreciar mejor en los dispositivos de medida fasorial (PMU), en los que, debido a su tasa de captura de datos, se pueden observar los transitorios de los puntos en los que están conectados. De esta forma, en el caso 2 (Fig. 3), correspondiente al test con las dos EVSE suministrando energía y alejadas del CT, las medidas tomadas por estos dispositivos, de izquierda a derecha y de arriba a abajo son: tensión en la fase A en cabecera del CT y en MR3, tensión en la fase B en cabecera del CT y en MR3, tensión en la fase C en cabecera del CT y en MR3, corriente en la fase A en cabecera del CT, corriente en la fase B en cabecera del CT y corriente en la fase C en cabecera del CT.
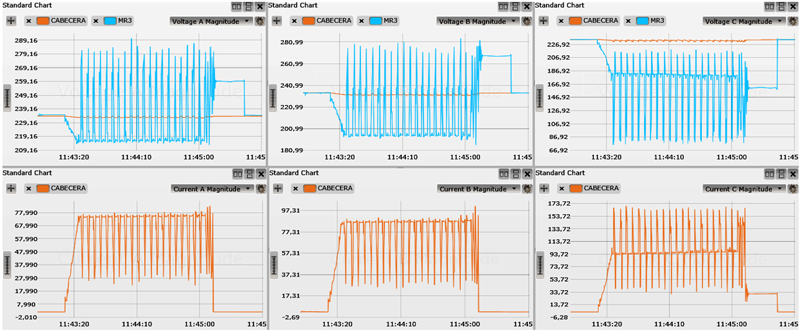
La Fig. 3 muestra que mientras que la tensión en cabecera del CT se mantiene aproximadamente constante, la tensión en MR3 presenta importantes fluctuaciones que no se han llegado a detectar con los sensores del propio punto de conexión de la estación, llegando a niveles máximos en las fases A y B de hasta unos 280V (1,22pu) y niveles mínimos en la fase C de 80V (0,35pu). A pesar de que el nivel de tensión en cabecera del CT es prácticamente constante en el tiempo en todos los casos de test presentados, no ocurre lo mismo con las corrientes por fase en este punto, que presentan una gran fluctuación además del desequilibrio entre fases ya mencionado.
La Fig. 4 representa los casos de test en los que únicamente una EVSE realiza carga del EV conectado de forma simultánea y las EVSE se encuentran alejadas del CT (casos 4 y 6), siendo la secuencia de medición la siguiente en cada una de las gráficas mostradas: primero se conecta la EVSE1, estando desconectada la EVSE2 (caso 4), y después se desconecta EVSE1 y se conecta EVSE2 (caso 6). El caso de test 4, en el que se conecta únicamente la EVSE1, al tener una mayor potencia nominal y ser trifásica, en las gráficas se aprecia una importante caída de tensión que afecta al punto de conexión MR3 y las gráficas de corriente representan un mayor consumo que en el caso de test 6 para todas las fases. En el caso del test 6, en las gráficas de tensión, se observa que, a pesar de que la fase de suministro es la C, la recarga influye también sobre las fases A y B, provocando un gran desequilibrio entre fases.
Como se ha visto en la presente sección, se pueden llegar a valores de tensión inaceptables, inestabilidades y grandes desequilibrios entre fases que hay que evitar para tener un suministro eléctrico seguro.
Conclusiones
En este documento se ha presentado un piloto de recarga de EV en un entorno real como ejemplo de digitalización y monitorización en tiempo real de la infraestructura de recarga del EV, siendo un paso imprescindible para una introducción de mecanismos de carga controlada que permitan una integración eficiente del EV en la red. Los resultados mostraron el impacto real que puede tener el EV en la red (alcanzándose caídas de tensión de hasta más del 30% del valor nominal, desequilibrios entre fases e inestabilidades), la importancia de la localización de las EVSE dentro de la propia red de distribución y el modo de carga en cuanto a la seguridad de suministro, y la necesidad de gestionar de manera activa la infraestructura, así como la planificación del proceso de recarga para limitar dicho impacto y lograr una integración eficiente del EV en la red.
Este piloto de recarga de EV permite potenciar los sistemas de almacenamiento energético dinámico que tiene los EV para que la energía pueda ser consumida y gestionada de manera inteligente, mejorando la observabilidad y controlabilidad de las futuras redes inteligentes a través de la gestión e integración de estos sistemas de almacenamiento dinámicos (vehículos eléctricos junto con sus estaciones de recarga), lo cual aporta una infraestructura para validar todos los desarrollos que permitan hacer frente a los problemas que se puedan presentar en la red con la electrificación de la movilidad.
Agradecimientos
La elaboración de este artículo se llevó a cabo en el marco de la red de Centros de Excelencia HySGrid+, con el título “Desarrollo de comunidades locales energéticamente positivas con sistemas híbridos de generación renovable y almacenamiento” financiado por el Ministerio de Ciencia, Innovación y Universidades a través del organismo CDTI, en el programa “CER-20191019”. Los autores agradecen la contribución del Instituto Valenciano de Competitividad Empresarial y del Fondo de Desarrollo Regional Europeo por hacer posible los desarrollos, permitiendo a ITE la difusión de los resultados y facilitando y promoviendo la transferencia de conocimiento a las empresas.
Referencias
- Al-Ogaili, A. S. y otros, 2019. Review on Scheduling, Clustering, and Forecasting Strategies for Controlling Electric Vehicle Charging: Challenges and Recommendations. IEEE Access, Volumen 7, pp. 128353-128371.
- Comisión Europea, 2011. A Roadmap for moving to a competitive low carbon economy in 2050, Bruselas: s.n.
- Frías, P. & Román, J., 2019. Vehículo eléctrico: situación actual y perspectivas futuras. Economía Industrial, Issue 411, pp. 11-20.
- Maza Ortega, J. M. & Gómez Expósito, A., 2019. Sistema de recarga de vehículos eléctricos: revisón tecnológica e impacto en el sistema eléctrico. Economía Industrial, Issue 411, pp. 35-43.
- Mesaric, P. & Krajcar, S., 2015. Home demand side management integrated with electric vehicles and renewable energy sources. Energy and Buildings
- Comisión Europea, s.f. Acuerdo de París. [En línea]
Disponible en: https://ec.europa.eu/clima/policies/international/negotiations/paris_es
[Último acceso: 21 Septiembre 2020]