Comunicación presentada al IV Congreso Smart Grids:
Autores
- Félix Garcia-Torres, Unidad de Simulación y Control, Centro Nacional del Hidrógeno
- Daniel G. Vilaplana, Unidad de Simulación y Control, Centro Nacional del Hidrógeno
- Carlos Bordons, Dpto. Ingeniería de Sistemas y Automática, Universidad de Sevilla
- Miguel Angel Ridao, Dpto. Ingeniería de Sistemas y Automática, Universidad de Sevilla
Resumen
Se presenta un sistema de gestión para microrredes interconectadas con almacenamiento en hídrogeno, baterías y supercondesnador basada en técnicas de control predictivo híbrido, estocástico y distribuido. La función objetivo tiene en cuenta tanto los beneficios económicos de intercambio de energía con la red principal respetando las distintas casuísticas de degradación asociadas a los sistemas de almacenamiento de energía. Para dotar de resiliencia a fallos el sistema siempre respeta el peor escenario posible bajo una formulación estocástica multi-escenario. Contempla el intercambio de energía entre microrredes vecinas usando una formulación de sistema de subsistemas donde se respeta la función de coste local y global.
Introducción
En el presente trabajo se muestran los resultados desarrollados en el marco del proyecto CONFIGURA – Control Predictivo de Microrredes Reconfigurables con Almacenamiento Híbrido y Móvil, que tiene como objeto desarrollar estrategias de control MPC (Control predictivo basado en el modelo, Model Predictive Control) para gestionar de manera eficiente la operación de estos sistemas, abordando la reconfigurabilidad tanto en lo referente a los componentes de una microrred, como a microrredes interconectadas.
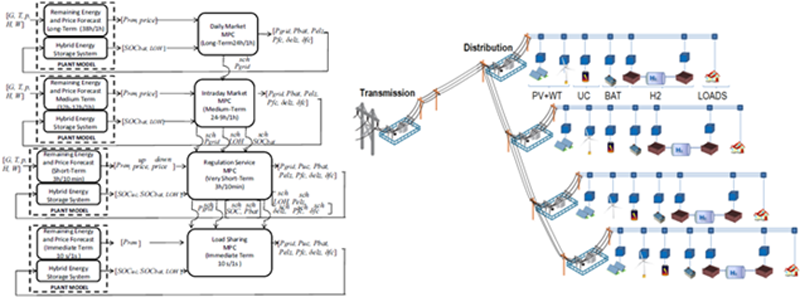
La formulación original del controlador fue introducida en (Garcia-Torres & Bordons, 2015), bajo una estructura de control jerárquico con 4 etapas (Véase Figura 1-izquierda). En el presente trabajo se incorpora técnicas de control predictivo estocástico y distribuido. El problema de control local de una de las microrredes de la figura 1, particularizado para el mercado diario de la energía, en un horizonte de control HC=24 horas y un tiempo de muestreo T<sub>s</sub>=1h, siendo h<sub>i</sub>, la hora i, usando la nomenclatura:
{grid:red,uc:supercondensador,bat:batería,fc:pila de combustible,elz:electrolizador} puede ser formulado como:
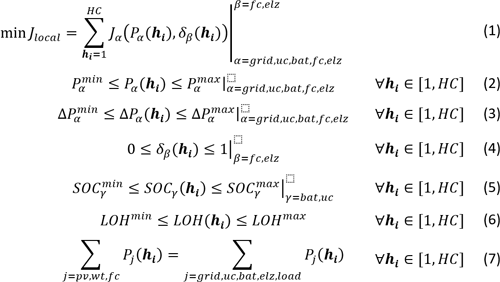
El beneficio o coste de intercambio de energía con la red eléctrica puede ser cuantificado, siendo Γsale(hi) y Γpur(hi) el precio horario de venta/compra de energía a red. Psale(hi) y Ppurhi) son las potencias de venta/compra a la red, para cada hora del mercado diario.
![]()
se puede vincular Psale(hi),Ppur(hi) y el intercambio de potencia total con la red Pgrid(hi), introduciendo las variables lógicas δsale(hi) y δpur(hi), siendo α=grid,β=pur y γ=sale
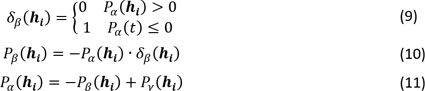
La restricción dada en (9) puede ser linealizada introduciendo las restricciones dadas según la proposición P8 dada en (Bemporad & Morari, 1999), al igual que el producto mixto integrado en la ecuación (10) puede ser descompuesto en las restricciones lineales dadas por la proposición P10 de (Bemporad & Morari, 1999).
La vida útil de las baterías es cuantificada por los fabricantes según un número de ciclos de vida útil. Dicho número de ciclos puede verse disminuido si la batería es expuesta a estrés de corriente en carga o descarga. Luego el coste de uso de la batería puede ser expresado según la ecuación siguiente:

Donde CCbat es el coste de adquisición de las baterías, Cyclesbat indica el número de ciclos de vida de las baterías, Pbat,ch y Pbat,dis es la potencia de carga y descarga de las baterías, bat,ch y ηbat,dis es el rendimiento en carga y descarga de las baterías. Costdegr,ch y Costdegr,dis son factores de cuantificación del coste de degradación de las baterías. La relación entre Pbat(hi),Pbat,ch(hi) y Pbat,dis(hi), se obtiene sustituyendo en (9)-(11), α=bat,β=bat,dis y γ=bat,ch e incorporando de manera similar las restricciones lineales dadas por las conversiones de (Bemporad & Morari, 1999). Finalmente, se integra el término de penalización frente al desvío en el instante final respecto a un estado de carga de baterías SOCbatref añadiendo dicho termino a la formulación original dada en (Garcia-Torres & Bordons, 2015), con objeto de dotar de resilencia ante fallos al sistema.
La vida útil del electrolizador y la pila de combustible viene determinado por un número de horas de funcionamiento. Siendo dicha vida útil disminuida por los fenómenos de degradación asociados al arranque, paradas y fluctuaciones de potencia. De la misma forma, estos equipos tienen un coste horario de mantenimiento Costo&m,i que debe ser insertado en la función de coste de uso de estos equipos:

Siendo CCi el coste de adquisición de los equipos, Hoursi el número de horas de vida dadas por el fabricante, δi (hi ) la variable de encendido/apagado del electrolizador y la pila, Coston,i) el coste asociado a la degradación por arranque y parada de los equipos, σon,i es el estado de arranque del electrolizador y la pila de combustible, Costdegr,i el coste de degradación asociado a las variaciones de potencia de los equipos excluyendo los instantes de arranque y parada (υi(hi)). La variable σon,i(hi) se vincula con δon,i(hi), dando lugar a las restricciones líneales introducidas en la proposición P2 de (Bemporad & Morari, 1999).
![]()
La variable υ_i (H_I ) se define como producto mixto
![]()
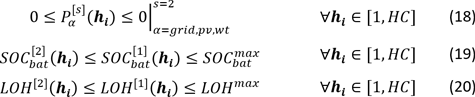
Dando lugar (15) a las restricciones lineales dadas en la proposición P2 de (Bemporad & Morari, 1999) y (16) a las restricciones dadas por la proposición P10 de (Bemporad & Morari, 1999), respectivamente. Al igual, que se ha hecho con las baterías se integra el término de penalización frente al desvío respecto a un nivel del tanque de almacenamiento en el instante final LOHref añadiendo dicho término a la formulación original dada en (Garcia-Torres & Bordons, 2015), con objeto de dotar de resilencia ante fallos al sistema. Se puede añadir resilencia ante fallos al sistema incorporando respecto a (Garcia-Torres & Bordons, 2015) una formulación estocástica multi-escenario del problema, en la que el controlador MPC busque el optimo de dos escenarios establecidos, el primero de ellos s=1, sería el escenario normal de funcionamiento en modo conectado a red. El segundo de ellos sería que el sistema en el peor escenario posible, debido a una caída de la red general y ausencia de generación (s=2) pudiera alimentar en todo momento a las cargas conectadas a la microrred. La función a optimizar variaría usando en esta formulación:

donde, se duplica el número de variables de optimización según el número de escenarios previstos. En este caso se debe de vincular ambos escenarios incorporando las siguientes restricciones al controlador. Las restricciones a imponer en el controlador en el escenario normal (s=1), han sido expuestas en las expresiones (2)-(7). Las restricciones a imponer en el escenario de fallos (s=2) serían similares pero imponiendo la expresión (18). De la misma forma para que el sistema pueda pasar siempre del escenario normal a escenario de fallo se han de integrar las expresiones (19) y (20).
En el caso de conexión de varias microrredes (Garcia-Torres et al., 2017), el problema se formula usando técnicas de control basadas en DMPC (Distributed Model Predictive Control), bajo una formulación lineal del problema cuadrático usando una linealización por trozos. La formulación del problema en este caso sería:
Donde (x) representa a la microrred x, N hace referencia a la red o network de microrredes interconectadas. La restricción (22) impone las restricciones de vínculo entre dos microrredes, siendo:
![]()
la potencia de intercambio entre la microrred (x) y la microrred (y). X (x) se define como el conjunto de variables de control de la microrred (x)
![]()
La restricción (23) impone que el punto de trabajo de una microrred en modo interconectado sea más favorable que en el caso de que funcione como microrred única.
En el caso del reparto optimo de potencia en tiempo real (véase ultimo nivel de control de la Figura 1 y (Garcia-Torres et al., 2016)) debido al coste computacional se plantea como sistema no distribuido aplicándose para cada microrred. Los sistemas de almacenamiento y el intercambio de energía con el exterior de la microrred se hacen acorde a la planificación de los niveles superiores. Se tienen las siguientes funciones de coste, estableciéndose un horizonte de control HC=15s, para tener en cuenta el tiempo de arranque de la pila de combustible y el electrolizador y un tiempo de muestreo Ts=1s, denotándose por tk un instante genérico dentro del horizonte de control.
![]()
Resultados experimentales
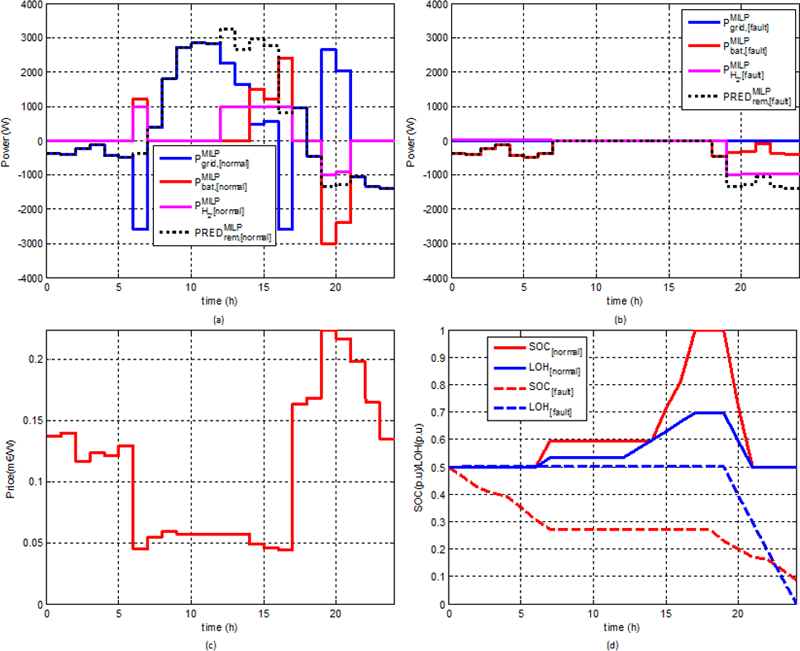
En la Figura 2., se muestran los resultados del controlador SMPC (Stochastic-MPC) para el mercado diario de la microrred. Como se puede observar, el estado de carga de las baterías y nivel de hidrogeno del escenario normal siempre respeta los mínimos establecidos en el escenario de fallo. De la misma forma el sistema minimiza el ciclado o picos de potencia de las baterías, así como arranques y paradas en los sistemas de hidrógeno o variaciones de potencia.
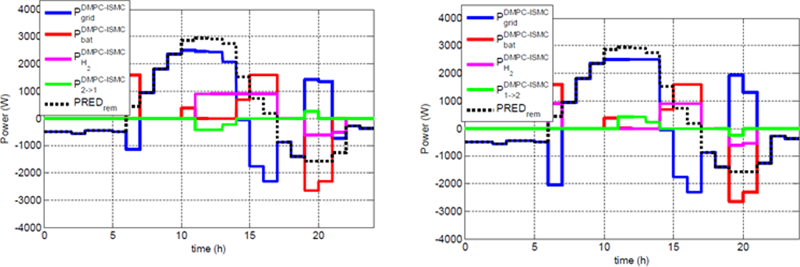
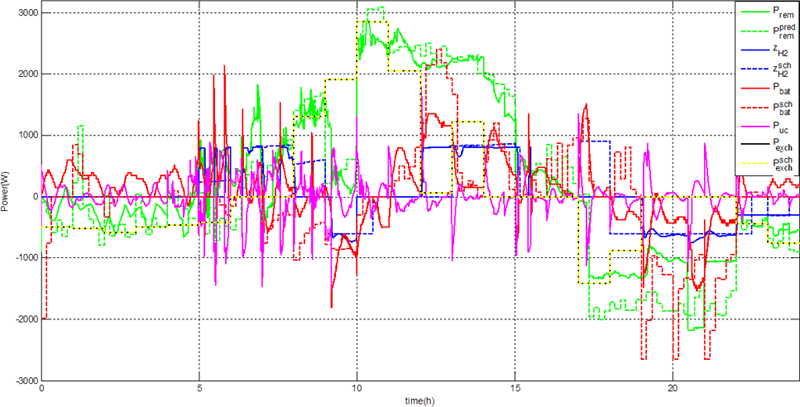
En la Figura , se presenta el caso de dos microrredes interconectadas. En la figura 4, se muestran los resultados experimentales ante un perfil de energía híbrido solar y eólico, en un día nublado, con fluctuaciones de generación y demanda. La formulación usada prioriza la asignación de fluctuaciones de potencia al supercondensador, después a la batería y por último a los sistemas de hidrógeno.
Agradecimientos
El presente trabajo ha sido realizado bajo el marco del proyecto CONFIGURA (DPI2016-78338-R) financiado por el Ministerio Español de Economía, Industria y Competitividad.
Referencias
- Garcia-Torres, F. y Bordons, C. «Optimal economical schedule of hydrogen-based microgrids with hybrid storage using model predictive control.» IEEE Transactions on Industrial Electronics 62.8 (2015): 5195-5207.
- Garcia-Torres, F., Valverde, L. y Bordons, C. Optimal load sharing of hydrogen-based microgrids with hybrid storage using model-predictive control. IEEE Transactions on Industrial Electronics, 2016, vol. 63, no 8, p. 4919-4928.
- Bemporad, A. y Morari, M. «Control of systems integrating logic, dynamics, and constraints.» Automatica 35.3 (1999): 407-427.
- Garcia-Torres, F., Bordons, C. y Ridao, M.A. «Optimal peer to peer market operation for microgrids with hybrid energy storage system using distributed model predictive control.» Innovative Smart Grid Technologies (ISGT Europe), 2017 8th IEEE PES International Conference and Exhibition on. IEEE, 2017.