Comunicación presentada al II Congreso Smart Grids:
Autor
- Ángel Silos Sánchez, Responsable de Protección y Telecontrol en Media Tensión, Schneider Electric
Resumen
La red eléctrica de Distribución de Media Tensión ha ido evolucionando durante estas décadas en relación a la calidad de suministro. La detección de defectos y la reconfiguración de la red han mejorado significativamente gracias a las tecnologías de telecontrol.
Esta comunicación propone una nueva línea de investigación y trabajo en la aplicación de un algoritmo para la detección de defectos direccionales y la reconfiguración automática de la red, conocida por el nombre de Self-Healing, a través de una arquitectura concreta de comunicación con el protocolo IEC61850 presente en los equipos de detección y telecontrol. De esta manera la inteligencia está distribuida en la red y no es necesaria una operación desde el centro de control optimizando así el tiempo de respuesta ante un defecto.
Introducción
La red eléctrica está en constante cambio debido a la aparición de nuevos actores que la están haciendo cambiar y la harán cambiar en las siguientes décadas. Ejemplo de ello son los Distributed Energy Resources (DER) posicionados tanto en la Red de Transmisión, en la de Distribución en Media Tensión como en Baja Tensión. No debe olvidarse que la aparición del vehículo eléctrico y el almacenaje acabarán conllevando en la red la creación de islas energéticas.
Estas evoluciones implican dos cambios importantes en la red respecto al modelo tradicional: la dirección del flujo de energía y la disponibilidad de energía. La dirección del flujo es bidireccional debido a que actualmente se presentan DERs en la red. Este hecho hace suponer que la detección de un defecto en la red sea más complicada que en el modelo tradicional.
Adicionalmente el hecho de disponer de energía distribuida y de sistemas más críticos en la red exige una mayor disponibilidad de suministro en la red. A partir de estas necesidades aparece el concepto Smart Grid que no deja de ser el vehículo necesario para poder llevar a cabo la adaptación de la red. Dentro de la Smart Grid es la automatización de la red uno de los puntos claves. Esta automatización puede ser dividida en Substation Automation, automatización de las subestaciones y Feeder Automation, automatización de la distribución, en la que se centra esta comunicación.
En la sección “Sistema de Inteligencia Distribuido” de este documento se expone el sistema de inteligencia distribuido donde se define la arquitectura de comunicaciones que debe disponer cada nodo de la red. En la sección “Algoritmo Direccional de Detección de Defectos” se describe el algoritmo de detección de defecto en el que cada nodo es conocedor de donde se sitúa el defecto en la red. Por otro lado en la sección “Protocolo de Actuación ante Defectos” se define el funcionamiento de actuación entre los diferentes nodos de la red eléctrica que tienen por objeto completar el sistema de reconfiguración automática.
Sistema de inteligencia distribuido
Las redes tradicionales de Distribución en Media Tensión disponen de un sistema inteligente centralizado en el Distribution System Operator, DSO, que les permite realizar la detección del defecto y su posterior reconfiguración. Esta operación se realiza a través de la información aportada por los equipos de detección de paso de falta y posteriormente por la actuación sobre el aparellaje a través de los equipos de telecontrol de la red. Este sistema centralizado monitoriza la información de todos los elementos en tiempo real a partir de del cual se toman las decisiones necesarias para la reconfiguración de la red.
Una manera de potenciar la automatización entre los elementos de control de la red consistiría en establecer vínculos de unión entre los diferentes equipos que conforman la red. De esta manera los equipos pueden recibir información parcial de la red con el objeto de tomar decisiones y reconfigurar la red sin necesidad de pasar por el centro de control.
Esta inteligencia distribuida en la red proporciona una automatización mucho más directa que la automatización tradicional desde un centro de control, permitiendo así aumentar el tiempo de respuesta de reconfiguración ante una falta. Esta regeneración de la red eléctrica es conocida por Self-Healing que permite mejor índices como el System Average Interruption Duration Index, SAIDI. No obstante esto no significa que el centro de control no pueda tener una actuación directa sobre la red con el objeto de controlar la actuación o interrumpirla.
Este tipo de automatización requiere de una red de comunicaciones independiente a la de telecontrol de los centros de transformación. Cabe destacar que el centro de control debe conocer el estado de los diferentes equipos pero no precisa de conocer la comunicación entre ellos. El objetivo es que cada nodo de la red ya sea un centro de transformación aéreo o subterráneo, un centro de reparto o un órgano de corte dispongan de una red local que vincule los equipos del nodo internamente con los de otros. Estas dos redes son: Telecontrol Network, para la comunicación de los equipos con el centro de control, y Automation Network, pensada para la automatización entre los equipos.
La red Telecontrol Network es una red ya establecida entre los nodos de la red eléctrica y el centro de control que puede estar presente en diferentes medios: radio analógica, radio digital, ADSL, etc. A diferencia de la Telecontrol Network la red Automation Network se establece entre varios nodos como si de una red local se tratase (Berganza et. al, 2014), de hecho no hay vinculación entre las dos se independizan a través de un elemento de comunicaciones como un router establecido en el centro.
El objetivo de la red Automation Network es dotar de un enlace de comunicación directo entre los equipos de telecontrol que conforman los centros de transformación. Esta red de comunicaciones se establece entre centros adyacentes vía una salida Broadband Power Line Communication, BPLC. La baja latencia de tiempos entre un centro y otro es del orden de 10 ms. Este hecho permite de forma rápida notificar el estado de un equipo a otro. A partir de este conocimiento de estado entre equipos se puede empezar a realizar la reconfiguración de la red eléctrica que haya caído. Adicionalmente cabe destacar que, con la tecnología BPLC, entre los diferentes nodos existen arquitecturas posibles que permiten una alta disponibilidad en la red de la información. (Andersson et. al, 2014).
Así una notificación puede ser transportada través de los diferentes equipos de los diferentes nodos estableciendo un automatismo de reconfiguración entre los mismos. Para poder establecer con criterio este automatismo se precisa que el nodo haga difusión a los nodos adyacentes de su estado. Este envío de información puede establecerse por medio del protocolo IEC61850 que trabaja en una red ETHERNET y que permite realizar una discriminación de la mensajería según la dirección Media Access Control, MAC, de cada equipo. Los mensajes entre los equipos a través del protocolo IEC61850 son conocidos como Generic Oriented Object Susbtation Event, GOOSE, los cuales son enviados como una ráfaga en intervalos configurables de un mínimo de 2 ms.
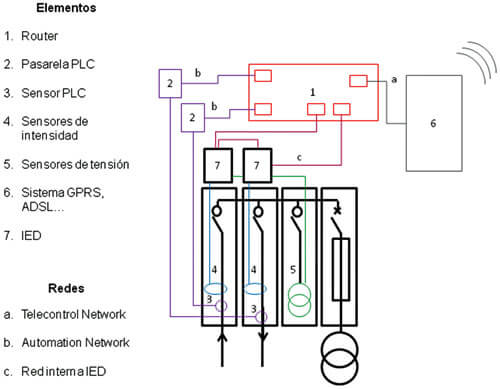
Por tanto cada nodo de la red eléctrica deberá disponer de una serie de equipos Intelligent Equipment Devices, IEDs, de protección, u otros detectores de paso de falta (Biasse, 2011), que permitan detectar el defecto direccional y comuniquen en IEC61850 y operen con los elementos de corte del mismo. Asimismo el nodo deberá disponer de una salida al centro control como red Telecontrol Network y otra como red Automation Network que estarán enlazadas por medio de los equipos de automatización del nodo. En la figura 1 se muestra la arquitectura presente en un centro de transformación, en el resto de nodos se debería adaptar esta arquitectura según sus características constructivas.
Cada IED debe recibir las señales de intensidad y tensión a través de sensores en las celdas para poder realizar la protección direccional de fases, ANSI 67, como la protección direccional de tierra, ANSI 67N ya que el sentido de alimentación en la red puede variar. También la funcionalidad ANSI 21FL, localización de falta, debe estar presente en estos equipos para ayudar en la localización física del defecto.
Entre los diferentes IED pueden formar una red de comunicación interna para tener un doble acceso a los mismos. La red Automation Network dispone de dos pasarelas PLC con el objeto de hacer la red más robusta. Finalmente la red de Telecontrol Network conectará los IEDs con el centro de control.
Algoritmo direccional de detección de defectos
En una red ideal todos los nodos que pueden modificar la configuración de la red con un cambio interno deberían estar automatizados con los dos tipos de redes. Aunque debido al coste que esto supone no todos los nodos tienen por qué tener un equipo de automatización que detecte defectos en la red o pueda operar en el nodo para cambiar su configuración interna. Por este motivo el algoritmo trata cada nodo de forma independiente de tal forma que no todos tengan que estar dentro del sistema Self-Healing. Otros algoritmos de detección de defectos en la red tratan la información de todos los nodos en el centro de control (Silos, 2012).
Con el objeto de poder hacer un Self-Healing en la red es necesario que en el momento del defecto cada nodo conozca la dirección del defecto así como la distancia del mismo. La primera información servirá para enviar una notificación a los nodos adyacentes con el objeto de hacer la configuración. La segunda información servirá al centro de control para en campo más tarde.
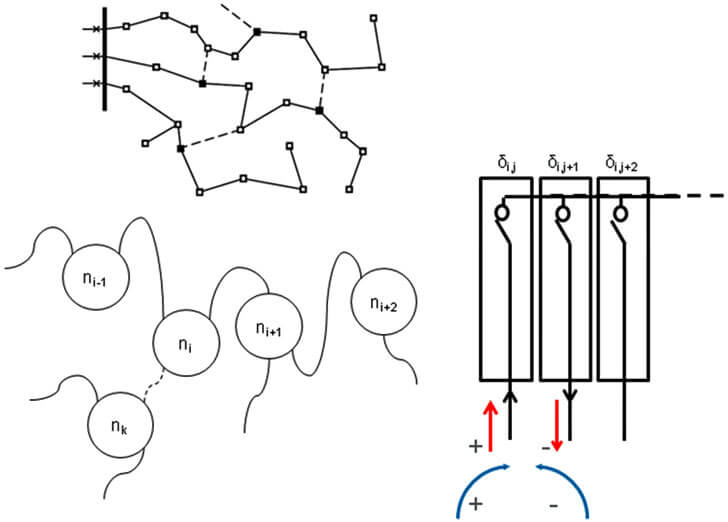
Se considera que un nodo tiene una vía de entrada y una vía de salida. Aunque esta entrada y salida pueden ir cambiando a otras vías enlazadas a otros circuitos con el objeto de hacer otros enlaces y recuperar la alimentación en la red. En la figura 2 se muestra una red mallada en la que se pueden montar conexiones entre diferentes nodos tras la salida de una subestación. A continuación se muestran estos diferentes nodos que suelen montar un anillo pero pueden enlazarse con otros nodos de otros anillos (Deschamps, 2009). A la derecha se identifica la estructura de cada nodo dentro del cual se encuentran los elementos de corte que los unen y desunen a otros.
Se define por tanto un algoritmo ƒ que dispone de las siguientes variables:
λÿ: Distancia del defecto ofrecido por la funcionalidad ANSI 21FL incorporada en el equipo de detección del elemento de corte j del nodo i. El valor de esta variable se expresa en km.
μÿ: Señalización del equipo de detección del elemento j del nodo i. Los estados de esta variables pueden ser: 0, si el detector no se activa, 1, si el detector se activa con dirección positiva, ó -1, si el detector se activa con dirección negativa. La dirección positiva se considera cuando la intensidad del defecto entra en el nodo y la dirección negativa cuando sale tal como se muestra en la figura 2.
εÿ: Estado de activación de la función de detección j del nodo i. El valor de esta variable es 1 ó 0 según el equipo haya detectado o no el defecto respectivamente.
δi,j: Elemento de corte j del nodo i. Este parámetro identifica a una salida o a una entrada de un nodo.
ƒ(λi,j,μi,j,εi,j,δi,j) = [Σnj-1 λi,j·j·μi,j / (Σnj-1j·εi,j)-2]·(δi,0δi,l … δi,n)·(εi,0,εi,l o εi,n)
Simplificando, se obtiene:
ƒ(λi,j,μi,j,εi,j,δi,j) =(-1)tλA·(δi,0+δi,l+…+δi,n)
La expresión anterior determina el sumatorio de los elementos de corte j de un nodo i por los que ha pasado el defecto. Asimismo el resultado queda multiplicado por la distancia media al defecto detectada por los IEDs situados en cada elemento de corte. Adicionalmente en el resultado se puede observar si el defecto ha sido positivo o negativo, es decir, si el defecto entra en el centro por el elemento j de menor peso y sale por el de mayor peso o viceversa respectivamente, como se muestra en la figura 2.
A nivel de implementación este algoritmo debe estar confinado en ambos equipos IED. De hecho los equipos pueden intercambiar información por medio del protocolo IEC61850 ya que ambos están formando una red interna dentro del nodo. Cada IED sería espejo del otro dentro del nodo.
Protocolo de actuación ante defectos
En la sección “Algoritmo Direccional de Detección de Defectos” se ha descrito un algoritmo que permite a un nodo conocer si el defecto que ha pasado por él ha sido en una dirección u en otra. De forma intrínseca el nodo puede conocer la dirección del defecto, la distancia al mismo y los elementos de corte por los que ha pasado y así empezar a realizar el automatismo de reconfiguración con otros nodos de la red.
Supóngase una red de m nodos cada uno de ellos con n elementos de corte enlazados entre ellos con una configuración especial en anillo abierto como muestra la figura 2. Tras haberse producido un defecto en la red, el dispositivo inteligente del órgano de corte δk del nodo ni que conoce el sentido del defecto, supóngase una circulación del órgano de corte δj al δk, enviará un mensaje GOOSE al nodo ni+1 que estará conectado con el órgano de corte δj a través del órgano de corte δk del nodo ni. La información indicada consistirá en la activación del defecto y el tipo, a tierra o de fases. Adicionalmente se enviará un GOOSE al órgano de corte δk del nodo ni-1 que es el que comunica con el nodo ni a través de su órgano de corte δj.
Cuando el órgano de corte δj del nodo ni+1 reciba el mensaje GOOSE y haya visto que el defecto se haya activado por su órgano de corte δk y que no haya recibido ningún GOOSE del órgano de corte δj del nodo ni+2 entonces significará que el defecto está entre el nodo ni+1 y el nodo ni+2.
A partir de este momento el nodo ni+1 debe iniciar el proceso de reconfiguración y para ello operará sobre el elemento de corte δk, por el que ha salido el defecto, abriéndolo. Tras esta actuación el nodo ni+1 notificará al nodo ni+2 esta apertura y éste actuará sobre el órgano de corte δj abriéndolo. A partir de este momento el defecto habrá quedado aislado. El nodo ni+2 enviará un mensaje de reconfiguración a través del resto de nodos hasta llegar al nodo ni+m que tenga un elemento de corte δp abierto para poder conectarse a otra red disponible.
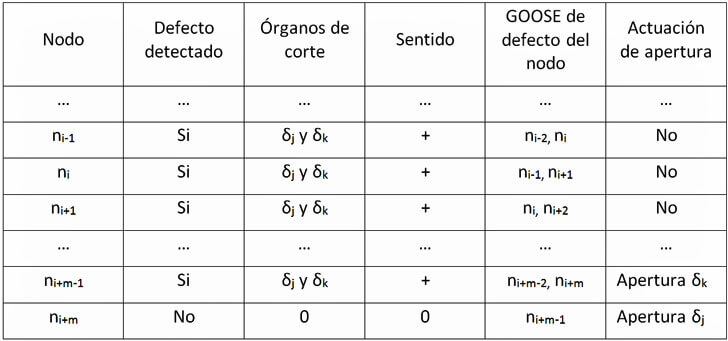
Toda la reconfiguración debe realizarse con la red afectada sin tensión para hacer una operación controlada. Previamente a la reconfiguración los órganos de corte deben permitir la actuación de los procedimientos automáticos de reenganche de las salidas de subestación. A continuación, en la Figura 3, se muestran las operaciones que realizaría un nodo intrínsecamente para reconfigurar la red.
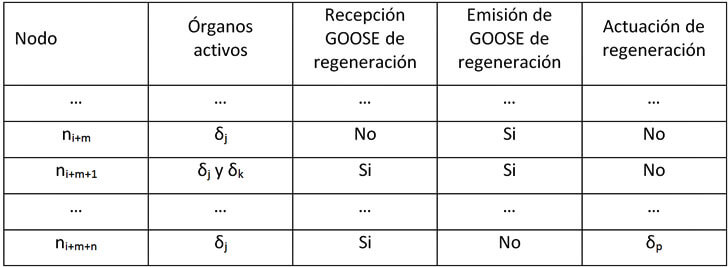
Una vez se ha aislado el defecto se procede a la reconfiguración de la red. En la Figura 4 se notifican los mensajes GOOSE a enviar con el objeto de reconfigurar la red.
Conclusiones a la aplicación de la solución
El automatismo de Self-Healing mostrado en las secciones anteriores permite disponer de una inteligencia en la red de forma distribuida detectando defectos y reconfigurándola. Combinando este tipo de propuestas junto con la arquitectura de redes en el centro así como tecnologías de comunicación como el PLC se pueden mejorar sustancialmente los tiempos de reconfiguración en la red.
La latencia de un mensaje GOOSE entre nodos de la red. Presenta una latencia muy baja. Gracias a ese tiempo todos los nodos conocen el estado de sus adyacentes y ya pueden realizar la reconfiguración de la red de una forma segura y automática. Cabe destacar que el algoritmo se puede complementar con niveles de seguridad en los que se verifica con detalle las detecciones y actuaciones de los diferentes IEDs diferenciándolos con su propia MAC.
Este algoritmo y protocolo de detección se ha ejemplarizado para redes de distribución de Media Tensión para la red eléctrica, aunque no debe olvidarse que estas mismas redes podrían estar presentes en la distribución eléctrica de grandes infraestructuras como aeropuertos, naves industriales, hospitales, etc.
Referencias
- Andersson, L., Maurer, M., Sendin, A., Simón, J., Solaz, 2014, High Availability Solution for Medium Voltage BPL Communication Networks, 2014 18th IEEE International Symposium On Power Line Communications and Its Applications. Glasgow.
- Berganza, I., Sendin, A., Simón, J., Urrutia, I., 2014, PLC Deployment and Architecture for Smart Grid Applications in Iberdrola, 2014 18th IEEE International Symposium On Power Line Communications and Its Applications. Glasgow.
- Biasse, J.M., Chollot, Y., Malot, A., 2011, Improving MV Network Efficiency with Feeder Automation, CIRED 21st International Conference on Electricity Distribution. Frankfurt.
- Deschamps, P., Orsini, J.C., Rasmussen, K.S., 2009, An Alternative Approach to Improving SAIDI and SAIFI Indicators, CIRED 20th International Conference on Electricity Distribution. Prague.
- Silos, A., 2012, Beneficios de la localización de defectos con Feeder Automation para una red eléctrica Smart Grid de distribución en Media Tensión, I Congreso Smart Grids. Madrid.